Jul 12, 2012
Analyse EO Smartcar
Oben habt ihr die PDF zum Download. Die Version ist schöner zum anschauen.
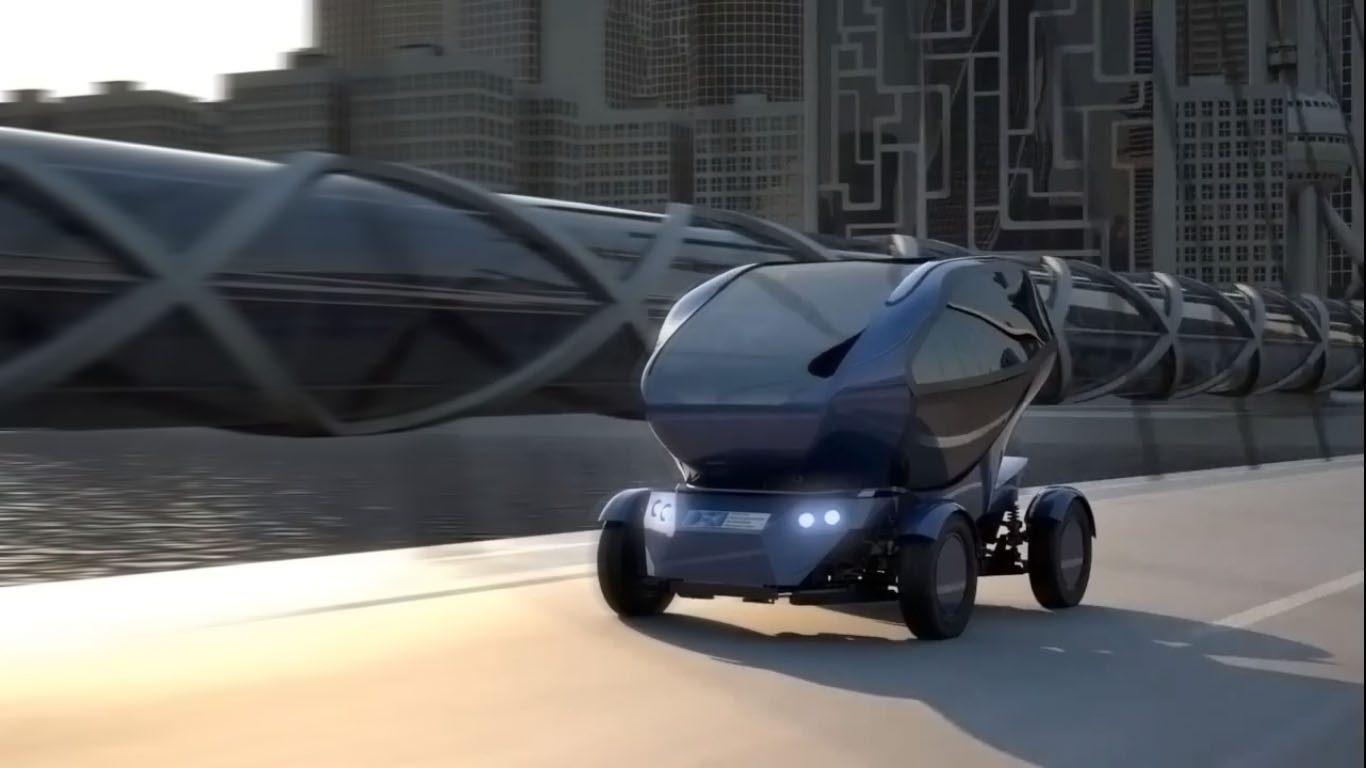
EO smart connecting car
Bei dem EO-Car handelt es sich um ein autonomes Fahrzeug, dass entwickelt wurde vom Bremer Robotics Innovation Center im deutschen Forschungszentrum für künstliche Intelligenz.
Wissenschaftlicher Leiter dieses Projektes ist Prof. Dr. Frank Kirchner und Projektleiter ist Dr. Thomas Vögele. Das Ziel war es ursprünglich eine neue Mobilität in Städten und bei Überlandfahrten zu schaffen. Diese neue Mobilität sollte durch ein vollkommen autonomes Fahrzeug erreicht werden, in Kombination mit vielen innovativen Technologien. Vor allem soll sich dieses Fahrzeug durch eine sehr hohe Flexibilität und einer maximalen Anzahl Freiheitsgraden auszeichnen und somit herkömmliche Autos bei weitem übertreffen. So gesehen handelt
es sich bei diesem Fahrzeug mehr um einen Roboter als um ein Auto. Denn es besitzt
sehr viele Eigenschaften wie man sie sonst von Planetenerkundungssonden kennt wie dem
Marsrover zum Beispiel.
Das Fahrzeug soll helfen, Staus und Verkehrsgedränge in Städten zu bekämpfen, ebenso
wie die zunehmende Umweltverschmutzung zu reduzieren. Außerdem soll eine Möglichkeit
gefunden werden auf eine alternative Energiequelle zurückzugreifen, wodurch eine
Unabhängigkeit von fossilen Energieträgern ermöglicht wird. In Zeiten wo die Preise für
fossile Treibstoffe immer höher werden, gibt es in diesem Feld immer mehr Handlungsbedarf.
Um das langfristige Ziel zu erreichen wurde ein Prototyp gebaut, der als Plattform dient
für sämtliche Technologien die an ihm geprobt werden. Aber schon jetzt ist er zu vielen
Dingen im Stande durch eine ganze Reihe von Techniken und Automatismen.
Der Wagen besizt einen Elektroantrieb mit eingebautem Akkumulator, der es ihm ermöglicht
ohne fossile Brennträger im weitesten Sinne auszukommen. Die Höchstgeschwindigkeit
des Antriebs ist aber allerdings noch auf 55 km/h begrenzt. Innerörtlich ist diese
Geschwindigkeit aber schon ausreichend.
Durch Linearaktuatoren ist der Wagen in der Lage alle seine vier Räder seperat zu lenken
und anzuheben. Damit besitzt er deutlich mehr Freiheitsgrade als ein herkömmliches
Auto. Er kann damit seitwärts fahren, was das Parken deutlich erleichtert oder auf der
Stelle wenden oder über kleinere Hindernisse “steigen”. Ebenso kann der Wagen sich in
die Kurven neigen was ihm mehr stabilität verleiht. Bei dem geringen Gewicht ist dies
auch notwendig. Denn dieses Beträgt gerade einmal 600 KG. Wenn es nötig ist kann das
Fahrzeug seine Form verändern mit Hilfe eines flexiblen Fahrwerks. Er kann seine Länge
verkürzen und vergrößert dabei gleichzeitig seine Höhe indem er die Fahrgastzelle anhebt
und dabei den Abstand zwischen Vorder- und Hinterachse verkleinert. Das ermöglicht das
einparken in die kleinsten Lücken oder erlaubt die Dichte des Verkehrs zu reduzieren.
Wenn die Möglichkeit besteht koppelt sich der EO-Smart mit anderen EOs zusammen zu
einem Roadtrain um gemeinsame Streckenpassagen zu fahren. Dazu bockt sich der Wagen
wie eben beschrieben auf um dann sich in den Roadtrain einzugliedern. Diese Maßnahme
hilft den Verkehr zu entlasten, da weniger Platz verbraucht und Strom eingespart wird
durch Ausnutzung des Windschattens. Das intelligente Energiessystem speist den Boardakku
an das Energienetz des Roadtrains an, was durch die Akkus der anderen Fahrzeuge
gebildet wird. Strom kann so verteilt und umgeleitet werden um einen leeren Akku auf
einen höheren Ladestand zu bringen sofern die anderen Fahrzeuge noch über genügend
Energie verfügen.
Das selbe System was es dem EO erlaubt sich an andere EOs anzukoppeln kann genutzt
werden um den Wagen zu erweitern. Z.B. mit einem Anbau für zusätzlichem Laderaum, der
dem EO das Aussehen eines Pickups verleiht. Dieser kann noch überdacht werden. Oder
man installiert einen Anbau um die Fahrgastzelle zu vergrößern um aus dem Zweisitzer
einen Familienvan zu machen. Alle diese Anbauten lassen sich mit zusätzlichen Akkumulatoren
erweitern für eine höhere Reichweite des Fahrzeugs oder um mehr Gewicht zu
transportieren.
Um dem Fahrer das Leben zu erleichtern ist aller Hand Sensorik und Rechenkapazität
im Auto verbaut worden. Der Wagen ist in der Lage Verkehrsteilnehmer zu erfassen und
anhand eines fortschrittlichen Navigationssystems Ziele anzusteuern. Der Computer ist
dabei in der Lage andere Verkehrsteilnehmer und Verkehrsregeln zu beachten, als auch
den aktuellen Akkustand. Neigt sich dieser dem Ende zu nimmt der Boardcomputer eine
Änderung des Kurses vor um zu tanken.
Grade die zuletzt genannte Technologie ist einer der interessantesten. Das Fahrzeug ist hier
im Stande seine Umgebung zu erkennen mittels Sensoren, gewaltigen Onlinedatenbanken
und Algorithmen die im Stande sind Geometrien zu erkennen um den besten Weg um ein
Hindernis zu finden.
Anmerkung: Hier gäbe es auch ein gewaltiges Potential für weitere Augmented-Reality-
Technologien wenn man die vorhandene Sensorik und Software dahingehend weiter nutzt
um weiterführende Umgebungsinformationen einzublenden. Die Fahrzeugscheibe ließe
sich mit heute schon vorhandenen Techniken als Display nutzen. Kameras könnten das
Display zusätzlich noch Touchfähig machen.
Linkliste
Seite des Forschungszentrums mit Demonstrationsvideo:
http://robotik.dfki-bremen.de/de/forschung/projekte/elektromobilitaet/item.html
Technische Daten:
http://robotik.dfki-bremen.de/de/forschung/robotersysteme/eo-smart-connecting-car.
html
Presse
Scinexx:
http://scinexx.de/dossier-detail-576-6.html
Focus-Online:
http://www.focus.de/auto/news/eo-smart-connecting-car-wunderwaffe-fuer-die-stadt_
aid_724459.html